Статья опубликована в рамках: VII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 25 декабря 2012 г.)
Наука: Технические науки
Секция: Космос, Авиация
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ПОЛУЧЕНИЕ ОБЩЕГО УРАВНЕНИЯ ДИНАМИКИ ГАЗОГЕНЕРАТОРА
Дронь Михаил Михайлович
студент 2 курса магистратуры, кафедра АВиРС ОмГТУ, г. Омск
Е-mail: u1TRo@mail.ru
Яковлев Алексей Борисович
научный руководитель, канд. техн. наук, доцент ОмГТУ, г. Омск
Жидкостная ракетная двигательная установка (ЖРДУ) является сложной технической системой, составляющим элементам которой присущ динамический характер протекающих в них процессов. Элементы ЖРДУ (камера, магистрали, турбонасосный агрегат, газогенератор и др.) сами по себе являются сложными динамическими звеньями, имеющими сложные связи между собой. В связи с этим при проектировании ЖРДУ необходимо уметь анализировать ее динамические свойства и свойства составляющих ее агрегатов с целью создавать отдельные узлы и двигательную установку в целом с заданными динамическими характеристиками [1, с. 15].
Таким образом, целью данной работы было получение общего уравнения динамики одного из элементов ЖРДУ с насосной системой подачи, а именно, однокомпонентного газогенератора (ГГ) и анализ его динамических свойств. Для этого было необходимо:
·провести декомпозицию ГГ на отдельные составляющие его элементы;
·получить уравнения динамики этих элементов;
·вскрыть внутренние связи элементов, составляющих ГГ, и получить его структурную схему;
·записать уравнение динамики ГГ и привести его к типовому виду;
·проанализировать основные динамические свойства ГГ.
Динамическая характеристика объекта регулирования (ОР) — это зависимость выходной величины ОР, выраженная аналитически или графически, от времени при изменении входных величин и действующих на ОР возмущений. ОР может быть часть какой-либо системы или целая система. Но и один объект может быть объектом сразу нескольких САУ [2, с. 354].
В данном случае ОР является газогенератор (ГГ), выполненный в виде системы, состоящей из камеры разложения, форсуночной головки и дроссельного крана, установленного на входе в ГГ. Для упрощения задачи сопротивления форсуночной головки ГГ и пакета катализатора объединены и рассматриваются как единый элемент с сосредоточенным сопротивлением.
Запишем уравнения динамики элементов системы.
1. Камера разложения
![]()
где: ![]() — постоянная времени камеры разложения;
— постоянная времени камеры разложения;
![]() — безразмерное отклонение давления топлива;
— безразмерное отклонение давления топлива;
![]() — безразмерное отклонение расхода в ГГ [3, с. 78].
— безразмерное отклонение расхода в ГГ [3, с. 78].
Переходный процесс соответствует уравнению динамики инерционного звена.
2. Форсуночная головка
![]()
где: ![]() — коэффициенты усиления;
— коэффициенты усиления;
![]() — отклонение давления в форсуночной головке ГГ. Переходный процесс соответствует уравнению динамики усилительного звена [1, с. 115].
— отклонение давления в форсуночной головке ГГ. Переходный процесс соответствует уравнению динамики усилительного звена [1, с. 115].
В этом выражении, коэффициент K6 характеризует своей величиной степень самовыравнивания процесса подачи расхода в камеру разложения с одновременным ее опорожнением. Величина этого коэффициента определяется из соответствующего выражения как уровнем режима, так и тангенсом угла наклона касательной к кривой (частной производной) связи расхода при постоянном давлении перед форсункой с давлением в камере разложения в точке номинального режима.
3. Дроссельный кран
![]()
где:  — коэффициенты усиления;
— коэффициенты усиления;
![]() — отклонение давления в баке;
— отклонение давления в баке;
![]() — относительная площадь открытия дроссельного крана [3, с. 80].
— относительная площадь открытия дроссельного крана [3, с. 80].
Поскольку данное уравнение динамики соответствует свойствам идеального усилительного звена по отношению к каждому из входов, то и переходные процессы воспроизводят на выходе форму входного сигнала без искажения, деформируя лишь его ординату.
Составим систему уравнений для описания объекта регулирования:

Можно сказать, что решением системы будет являться уравнение первого порядка, т. к. уравнения динамики форсуночной головки и дроссельного крана имеют нулевой порядок, а камера разложения имеет первый порядок дифференцирования по времени. Решая последовательно данную систему, получим:
![]() .
.
Данное уравнение является общим уравнением динамики газогенератора и имеет следующие коэффициенты усиления и постоянную времени:

По своим свойствам это уравнение первого порядка и соответствует уравнению динамики инерционного звена.
Переходная характеристика этого звена представляет собой экспоненциальную зависимость вида
![]()
где: ![]() — входные воздействия.
— входные воздействия.
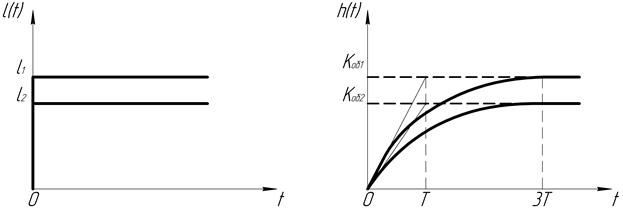
Рисунок 1. Переходная характеристика инерционного звена
Полученное уравнение существенно упрощает структурную схему САУ, делая её не такой громоздкой и сложной (рис. 2).

Рисунок 2. Структурная схема газогенератора
Из общего уравнения газогенератора можно увидеть, что для нахождения выходной величины — ![]() , достаточно знать только две входные величины —
, достаточно знать только две входные величины — ![]() и
и ![]() , а так же конструктивные параметры и зависимости от времени давления и расхода рабочего тела. Полученное уравнение так же отражает наполнение (или расходование) газа с учетом его сжимаемости, что подтверждает свойство инерционности, но оно не учитывает запаздывание разложения (воспламенения) топлива. Данное свойство может быть учтено введением в ОР дополнительного звена с чистым (постоянным) запаздыванием.
, а так же конструктивные параметры и зависимости от времени давления и расхода рабочего тела. Полученное уравнение так же отражает наполнение (или расходование) газа с учетом его сжимаемости, что подтверждает свойство инерционности, но оно не учитывает запаздывание разложения (воспламенения) топлива. Данное свойство может быть учтено введением в ОР дополнительного звена с чистым (постоянным) запаздыванием.
Список литературы:
1. Бабкин А.И. и др. Основы теории автоматического управления ракетных двигательных установок. — М.: Машиностроение, 1986. — 456 с.
2. Попов Е.П. Теория линейных систем автоматического регулирования и управления. — М.: Наука, 1978. — 800 с.
3. Яковлев А.Б. Уравнения динамики двигательной установки. — Омск: Изд-во ОмГТУ, 1999. — 88 с.
дипломов
Оставить комментарий