Статья опубликована в рамках: XXXVI-XXXVII Международной научно-практической конференции «Естественные и математические науки в современном мире» (Россия, г. Новосибирск, 07 декабря 2015 г.)
Наука: Информационные технологии
Секция: Математическое моделирование, численные методы и комплексы программ
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
РАСЧЕТ ПАРАМЕТРОВ МОДЕЛИ АСИНХРОННОГО ПРИВОДА
Иванов Дмитрий Сергеевич
магистрант,
Омский Государственный Технический Университет,
РФ, г. Омск
E-mail: dmitriy-1992@mail.ru
Долингер Станислав Юрьевич
ст. преподаватель,
Омский Государственный Технический Университет,
РФ, г. Омск
E-mail:
THE CALCULATION OF PARAMETERS OF THE ASYNCHRONOUS DRIVE MODEL
Dmitry Ivanov
master student,
Omsk State Technical University,
Russia, Omsk
Stanislav Dolinger
lecturer,
Omsk State Technical University,
Russia, Omsk
АННОТАЦИЯ
В настоящей работе был произведен расчет параметров асинхронного привода и моделирование его в приложении Simulink программного комплекса MATLAB. Управление приводом будет осуществляться через частотный преобразователь, преобразователь выполнен на основе IGBT транзисторов. По окончанию моделирования получили графики по которым можно сделать вывод, что модель выполнена успешно.
ABSTRACT
In the present work the calculation of parameters of the asynchronous drive and its modeling in the Simulink appendix of the program complex MATLAB was made. Control of the drive will be exercised via the frequency converter, the converter is implemented on the basis of IGBT transistors. On the end of modeling the schedules were received through which it is possible to draw a conclusion that the model works.
Ключевые слова: асинхронный привод; преобразователь частоты; диодный мост; генератор импульсов; IGBT транзисторы; Matlab Simulink.
Keywords: asynchronous drive; frequency converter; diode bridge; the pulse generator; IGBT transistors; Matlab Simulink.
Большое распространение электродвигателей переменного тока для привода механизмов различных систем обусловлено простотой, надежностью и относительно небольшой стоимостью этих машин. Основным недостатком асинхронных электродвигателей с короткозамкнутым ротором является постоянная частота вращения ротора электродвигателя, практически не зависящая от нагрузки. Однако подавляющее большинство систем, элементами которых являются приводимые электродвигателем механизмы, работают в режимах с переменной нагрузкой, что позволяет применять преобразователи частоты, которые позволяют точно управлять скоростью и моментом электродвигателя по заданным параметрам в точном соответствии с характером нагрузки. Это в свою очередь, позволяет осуществлять точное регулирование практически любого процесса в наиболее экономичном режиме, без тяжёлых переходных процессов в технологических системах и электрических сетях.
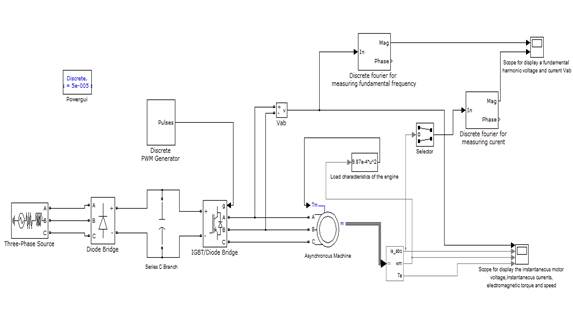
Рисунок 1. Модель асинхронного привода
Первый блок – трехфазный источник напряжения.
Моделирует трехфазный источник напряжения. Этот блок включает в себя три источника переменного напряжения, соединенных в звезду с нулевым проводом или без него. Каждая фаза источника обладает внутренним активно-индуктивным сопротивлением. Внутренние сопротивления всех фазисточника одинаковы. Внутреннее сопротивление источника может быть задано непосредственно с помощью значений сопротивления и индуктивности фазы или косвенно, с помощью параметров короткого замыкания. Мы в качестве источника напряжения берем трансформатор марки ТМ-630 /10. Необходимые параметры берем из справочной литературы, и часть параметров рассчитываем по приведенным ниже формулам.
Параметры ТМ-630/10:
![]() (1)
(1)
![]() (2)
(2)
где: ![]() – активное сопротивление источника, Ом;
– активное сопротивление источника, Ом;
![]() – индуктивное сопротивление источника, Ом;
– индуктивное сопротивление источника, Ом;
![]() – мощность трансформатора,
– мощность трансформатора, ![]() ;
;
![]() – напряжение на высокой стороне трансформатора,
– напряжение на высокой стороне трансформатора, ![]() ;
;
![]() – напряжение на низкой стороне трансформатора,
– напряжение на низкой стороне трансформатора, ![]() ;
;
![]() – частота,
– частота, ![]() ;
;
![]() – потери холостого хода,
– потери холостого хода, ![]() ;
;
![]() – потери короткого замыкания,
– потери короткого замыкания, ![]() ;
;
![]() – ток холостого хода,
– ток холостого хода, ![]() ;
;
![]() – напряжение короткого замыкания,
– напряжение короткого замыкания,![]() .
.
Второй блок – диодный мост.
Моделирует диодный мост. Модель UniversalBridge позволяет выбирать количество плеч моста (от 1 до 3), вид полупроводниковых приборов (диоды, тиристоры, идеальные ключи, а также полностью управляемые тиристоры, IGBT и MOSFET транзисторы, шунтированные обратными диодами). В этом блоке в качестве полупроводников мы используем диоды.
Выбираем диод по следующим параметрам:
![]() (3)
(3)
![]() (4)
(4)
где: ![]() – ток протекаемый по диоду, А;
– ток протекаемый по диоду, А;
![]() – максимально допустимое постоянное обратное напряжение, В;
– максимально допустимое постоянное обратное напряжение, В;
![]() – номинальный ток статора, А;
– номинальный ток статора, А;
![]() – линейное напряжение,
– линейное напряжение, ![]()
Берем диод марки 2Д299ОБ.
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
![]() – внутреннее сопротивление диода, Ом;
– внутреннее сопротивление диода, Ом;
![]() – емкость демпфирующей цепи, Ф;
– емкость демпфирующей цепи, Ф;
![]() – номинальная мощность преобразователя, Вт;
– номинальная мощность преобразователя, Вт;
![]() – сопротивление демпфирующей цепи, Ом;
– сопротивление демпфирующей цепи, Ом;
![]() – импульсный прямой ток, А;
– импульсный прямой ток, А;
![]() – импульсное прямое напряжение, В;
– импульсное прямое напряжение, В;
![]() – основная частота, Гц;
– основная частота, Гц;
![]() – номинальное напряжение, В;
– номинальное напряжение, В;
![]() – время, с.
– время, с.
Третий блок – фильтр.
Фильтры подобного рода используются в энергетических системах для снижения искажений напряжения и тока, а также повышения коэффициента мощности.
В этом блоке необходима рассчитать:
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
где: ![]() – емкость фильтра,
– емкость фильтра,
Ф; ![]() – коэффициент фильтрации;
– коэффициент фильтрации;
![]() – сопротивление, Ом;
– сопротивление, Ом;
![]() – коэффициент пульсации;
– коэффициент пульсации;
![]() ;
; ![]() – частота основной гармоники.
– частота основной гармоники.
Четвертый блок – IGBT/Диодный мост.
Моделирует транзисторный мост. Модель UniversalBridge позволяет выбирать количество плеч моста (от 1 до 3), вид полупроводниковых приборов (диоды, тиристоры, идеальные ключи, а также полностью управляемые тиристоры, IGBT и MOSFET транзисторы, шунтированные обратными диодами). В этом блоке в качестве полупроводников мы используем IGBT/Diodes.
Выбираем транзистор типа IRG4PH40U.
Параметры транзистора:
![]() (12)
(12)
![]() (13)
(13)
![]() (14)
(14)
![]() – внутреннее сопротивление диода, Ом;
– внутреннее сопротивление диода, Ом;
![]() – емкость демпфирующей цепи, Ф;
– емкость демпфирующей цепи, Ф;
![]() – сопротивление демпфирующей цепи, Ом;
– сопротивление демпфирующей цепи, Ом;
![]() – импульсный прямой ток, А;
– импульсный прямой ток, А;
![]() – номинальная мощность преобразователя, Вт;
– номинальная мощность преобразователя, Вт;
![]() – импульсное прямое напряжение, В;
– импульсное прямое напряжение, В;
![]() – основная частота, Гц;
– основная частота, Гц;
![]() – номинальное напряжение, В;
– номинальное напряжение, В;
![]() – время, с.
– время, с.
Пятый блок – асинхронный двигатель.
Блок AsynchronousMachine моделирует, асинхронную электрическую машину в двигательном или генераторном режимах. Режим работы определяется знакомэлектромагнитного момента машины. Порты модели А, В и С являются выводами статорной обмотки машины, а порты а, bи с – обмотки ротора машины. Порт Тm предназначен для подачи моментасопротивления движению. На выходном порту m формируется векторный сигнал, состоящий из 21 элемента: токов, потоков и напряжений ротора и статоравнеподвижной и вращающейся системах координат, электромагнитного момента, угловой частоты вращения вала, а также его углового положения. Для удобства извлечения переменных машины из вектора в библиотеке SimPowerSystemsпредусмотрен блок MachinesMeasurementDemux. Модель асинхронной машинывключает в себя модель электрической части, представленной моделью пространства состояний четвертого порядка, и модель механической части в виде системывторого порядка. Все электрические переменные и параметры машины приведены к статору. Исходные уравнения электрической части машины записаны длядвухфазной (dq-оси) системы координат. На рис. 2 приведена схема замещения машины.

Рисунок 2. Схема замещения машины
Уравнения электрической части машины имеют вид:
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
![]() (18)
(18)
![]() (19)
(19)
Механическая часть машины описывается двумя уравнениями:
![]() (20)
(20)
![]() (21)
(21)
где: ![]() – проекция напряжения на ось q;
– проекция напряжения на ось q;
![]() – проекция напряжения на ось d;
– проекция напряжения на ось d;
![]() – проекция напряжения на ось q;
– проекция напряжения на ось q;
![]() – проекция напряжения на ось d;
– проекция напряжения на ось d;
![]() – электромагнитный момент;
– электромагнитный момент;
![]() – проекция переменной на ось d;
– проекция переменной на ось d;
![]() – проекция переменной на ось q;
– проекция переменной на ось q;
![]() – индекс, обозначающий параметр или переменную ротора;
– индекс, обозначающий параметр или переменную ротора;
![]() – индекс, обозначающий параметр или переменную статора.
– индекс, обозначающий параметр или переменную статора.
Выбираем асинхронный двигатель марки 4А180М2Н3 [3, с. 27].
Параметры асинхронной машины рассчитываются последующим выражениям:
![]() (22)
(22)
![]() (23)
(23)
![]() (24)
(24)
![]() (25)
(25)
![]() (26)
(26)
![]() (27)
(27)
![]() (28)
(28)
![]() (29)
(29)
![]() (30)
(30)
![]() (31)
(31)
![]() (32)
(32)
 (33)
(33)
![]() (34)
(34)
![]() (35)
(35)![]() (36)
(36)
где:![]() – номинальное фазное напряжение, В;
– номинальное фазное напряжение, В;
![]() – частота вращения магнитного поля (синхронная частота вращения), об/мин;
– частота вращения магнитного поля (синхронная частота вращения), об/мин;
![]() – номинальное скольжение;
– номинальное скольжение;
![]() – критическое скольжение;
– критическое скольжение;
![]() – угловая частота вращения магнитного поля (синхронная частота), рад/с;
– угловая частота вращения магнитного поля (синхронная частота), рад/с;
![]() – номинальная угловая частота вращения вала, рад/с;
– номинальная угловая частота вращения вала, рад/с;
![]() – номинальный момент, Нм;
– номинальный момент, Нм;
![]() – пусковой момент, Нм;
– пусковой момент, Нм;
![]() – максимальный момент, Нм;
– максимальный момент, Нм;
![]() – механические потери, Вт;
– механические потери, Вт;
![]() – расчетный коэффициент;
– расчетный коэффициент;
![]() – приведенное активное сопротивление ротора, Ом;
– приведенное активное сопротивление ротора, Ом;
![]() – активное сопротивление статора, Ом;
– активное сопротивление статора, Ом;
![]() – приведенная индуктивность рассеяния статораи ротора, Гн;
– приведенная индуктивность рассеяния статораи ротора, Гн;
![]() – индуктивность статора, Гн;
– индуктивность статора, Гн;
![]() – индуктивность цепи намагничивания, Гн.
– индуктивность цепи намагничивания, Гн.
Шестой блок – функция.
Блок Fcn моделирует нагрузочную характеристику двигателя, вращающий момент в функции скорости двигателя. Мы примем квадратичную характеристику вращающий момент в функции скорости двигателя (т. е. нагрузка будет вентиляторная илинасосная). Вращающий момент ![]() тогдапропорционален квадрату скорости
тогдапропорционален квадрату скорости ![]() .
.
![]() (37)
(37)
![]() (38)
(38)
![]() – выражение для вращающего момента в функции скорости.
– выражение для вращающего момента в функции скорости.
где: ![]() – номинальный момент, Нм;
– номинальный момент, Нм;
![]() – номинальная угловая частота вращения вала, рад/с;
– номинальная угловая частота вращения вала, рад/с;
![]() – постоянная.
– постоянная.
Седьмой блок – генератор импульсов.
БлокDiscretePWMGeneratorblock осуществляет управлениемостовым инвертором. Выходные импульсы вектора (со значениями = 0 или 1). Выбираем режим генератора – трех фазный мост. В этом случае выходной вектор содержит 6 импульсов. Импульсы 1,3 и 5 соответственно для верхних выключателей первого, второго и третьего плеча, а импульсы 2,4 и 6 для нижних переключателей.
Устанавливаем следующие параметры:![]() – несущая частота, Гц;
– несущая частота, Гц; ![]() – типовое время, с;
– типовое время, с;![]() – показатель модуляции;
– показатель модуляции; ![]() – частота выходного напряжения, Гц;
– частота выходного напряжения, Гц;![]() – фаза выходного напряжения, град.
– фаза выходного напряжения, град.
Восьмойблок – фурье.
Блок fourier измеряет основную составляющую (50Гц), входящую внесинусоидальное напряжение ![]() и в ток фазы А.
и в ток фазы А.
Параметры блока: ![]() – основная частота, Гц;
– основная частота, Гц; ![]() – номер гармоники;
– номер гармоники;![]() - датчик напряжения.
- датчик напряжения.
Девятый блок – фурье.
Блок fourier измеряет ток фазы. Selector – переключатель.
Десятый и одиннадцатый блоки – осциллографы.
Блок Scope используем, чтобы отобразить мгновенное напряжение двигателя,мгновенные токи, скорость и электромагнитный моменти чтобыотобразить основную гармонику напряжения ![]() и тока
и тока ![]() .
.
Параметры блока:![]() – число графиков;
– число графиков; ![]() – временной интервал, с.
– временной интервал, с.
В данной статье предоставлен расчет параметров модели асинхронного привода, правильность расчетов отображают ниже приведенные рисунки.

Рисунок 3. Мгновенное напряжение

Рисунок 4. Мгновенные токи

Рисунок 5. Скорость

Рисунок 6. Электромагнитный момент
Список литературы:
- Кузнецов М.С. Модернизация частотно-регулируемых асинхронных электроприводов серии ЭЧР при ограниченном информационном обеспечении: Автореферат дис. на соискание ученой степени канд. тех. наук- Санкт-Петербург. 2007, – 18 с.
- Справочник по полупроводниковым диодам: [Электронный ресурс]. – Режим доступа. – URL: http://www.volt-220.com/images/book/diod.pdf (дата обращения: 20.10.2015).
- Кравчик М.М., Шлаф В.И., Афонин Е.А. Асинхронные двигатели серии 4А: Справочник – М.: Энергоаудит, 1982. – С. 25–86.
- Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystemsи Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- Power System Blockset User’s Guide COPYRIGHT1998 – 2000 by TEQSIM International Inc., a sublicense of Hydro-Quebec,and The Mathworks Inc. – 483 c., авторперевода Гнедин П.А.
дипломов
Комментарии (1)
Оставить комментарий