
Статья опубликована в рамках: II Международной научно-практической конференции «Наука вчера, сегодня, завтра» (Россия, г. Новосибирск, 24 июля 2013 г.)
Наука: Математика
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

АНАЛИЗ АВТОКОЛЕБАНИЙ КОЛЕСНОГО МОДУЛЯ ПРИ ДВУХ МОДЕЛЯХ ВЗАИМОДЕЙСТВИЯ КОЛЕСА С ОПОРНОЙ ПОВЕРХНОСТЬЮ
Вельмагина Наталья Александровна
соискатель, ИПММ НАН Украины, г. Донецк
E-mail:
Вербицкий Владимир Григорьевич
профессор, д-р ф.- мат. наук, ИПММ НАН Украины, г. Донецк
E-mail:
Проведен сравнительный анализ двух моделей взаимодействия колеса с опорной поверхностью в боковом направлении (нелинейной гипотезы увода И. Рокара и неголономной модели М.В. Келдыша, в которой учитывается нелинейность боковой силы) на характер автоколебаний колесной сцепки.
Ключевые слова: автоколебания, устойчивость, колесный модуль.
Введение. Явление шимми — это интенсивные самовозбуждающиеся колебания катящихся колес, проявляющиеся в виде крутильных движений колес в горизонтальной плоскости (их верчения), которые сопровождаются другими движениями из продольной вертикальной плоскости [3, 4].
Шимми элементов шасси в первую очередь связано с наличием упругого пневматика, который при определенных условиях «трансформирует» часть подводимой к транспортному средству энергии в энергию крутильных колебаний колеса и стойки.
Анализ условий возникновения автоколебаний был и остается предметом исследования многих авторов как представителей теоретического направления [1, 5, 6, 8, 11, 15, 16], так и инженеров-исследователей авиационного и автомобильного транспорта [3, 4, 9, 12—14, 17]. При определении характеристик боковой реакции упругого колеса с опорной поверхностью наибольшее распространение получили две постановки: модельная (теория М.В. Келдыша [5]) и феноменологическая (аксиоматика И. Рокара [10]).
В целом задачу о возникновении шимми можно разбить на две части — задачу определения границы устойчивости в пространстве параметров (линейная задача) и задачу определения характеристик автоколебаний (амплитуда, частота), что требует учета нелинейных характеристик взаимодействия.
В данной работе проведен сравнительный анализ устойчивости прямолинейного движения простейшей модели колесной сцепки (рояльной конструкции), имеющей свободу рысканья относительно вертикальной оси, для двух моделей взаимодействия колеса с опорной поверхностью в боковом направлении (нелинейной гипотезы увода И. Рокара и модели М.В. Келдыша, в которой учтен нелинейный характер боковой силы).
Основная часть. Уравнения возмущенного движения передней стойки в работе представлены для частного случая вертикальной стойки шасси с целью получения обозримых аналитических соотношений, которые можно сравнить с аналогичными известными результатами, полученными на основе линейных моделей взаимодействия [8].
![]() (1)
(1)
![]()
В системе (1) представлена модель взаимодействия колеса с опорной поверхностью по И. Рокару [16]. Первое уравнение отвечает кинематической связи, принятой в теории неустановившегося увода, здесь δ — угол увода колеса (угол между вектором скорости центра колеса и продольной плоскостью симметрии колеса); V — скорость невозмущенного движения; σ — параметр релаксации. Сила увода ![]() имеет характер функции насыщения, при малых углах увода представима в виде линейной функции
имеет характер функции насыщения, при малых углах увода представима в виде линейной функции ![]() , где
, где ![]() — коэффициент сопротивления уводу;
— коэффициент сопротивления уводу; ![]() — стабилизирующий пяточный момент, представлен в виде линейной функции угла увода
— стабилизирующий пяточный момент, представлен в виде линейной функции угла увода ![]() . Конструктивные параметры системы: F — момент инерции относительно оси вращения стойки, k — коэффициент демпфирования, l — вынос колеса, предполагается положительным (вынос назад), с — крутильная жесткость стойки относительно вертикальной оси.
. Конструктивные параметры системы: F — момент инерции относительно оси вращения стойки, k — коэффициент демпфирования, l — вынос колеса, предполагается положительным (вынос назад), с — крутильная жесткость стойки относительно вертикальной оси.
Уравнения возмущенного движения колесной сцепки, соответствующие модели М.В. Келдыша [5, 8], имеют вид (2)
![]() ;
;
![]() ; (2)
; (2)
![]()
где: y — боковая деформация пневматика,
![]() — угловая деформация пневматика (
— угловая деформация пневматика (![]() — связь с углом увода),
— связь с углом увода),
![]() — боковая сила,
— боковая сила,
![]() — пяточный момент.
— пяточный момент.
В этом случае для описания модели требуется четыре параметра ay — коэффициент жесткости колеса в поперечном направлении (![]() — поперечная сила в линейном приближении), b – крутильная жесткость колеса (
— поперечная сила в линейном приближении), b – крутильная жесткость колеса (![]() — пяточный момент относительно вертикальной оси),
— пяточный момент относительно вертикальной оси), ![]() — кинематические параметры, входящие в уравнения кинематических (неголономных) связей. Если формально принять соотношение
— кинематические параметры, входящие в уравнения кинематических (неголономных) связей. Если формально принять соотношение ![]() , которое, вообще говоря, справедливо при качении колеса с установившимся уводом, то учитывая соотношение между
, которое, вообще говоря, справедливо при качении колеса с установившимся уводом, то учитывая соотношение между ![]() , из физических соображений получим
, из физических соображений получим ![]() (система (2) вырождается в систему (1)). Как показано в [11], параметр релаксации определяется отношением кинематических параметров
(система (2) вырождается в систему (1)). Как показано в [11], параметр релаксации определяется отношением кинематических параметров ![]() (это же соотношение следует из второго уравнения системы (2) при предположении о реализации установившегося увода), что дает возможность определить параметры модели И. Рокара по параметрам модели М.В. Келдыша.
(это же соотношение следует из второго уравнения системы (2) при предположении о реализации установившегося увода), что дает возможность определить параметры модели И. Рокара по параметрам модели М.В. Келдыша.
Далее учитывая согласованность параметров (![]() , определим условия устойчивости по линейному приближению систем (1) и (2).
, определим условия устойчивости по линейному приближению систем (1) и (2).
Граница области колебательной неустойчивости системы (1) задается соотношением (3) (условие обращения в нуль предпоследнего определителя Гурвица), в котором участвует приведенный коэффициент сопротивления уводу ![]() , учитывающий влияние пяточного момента (формально соответствует увеличению номинального коэффициента сопротивления уводу)
, учитывающий влияние пяточного момента (формально соответствует увеличению номинального коэффициента сопротивления уводу)
![]() (3)
(3)
Далее рассмотрены характерные особенности границы области устойчивости в пространстве характерных конструктивных параметров системы. Наличие положительных корней уравнения (3) относительно параметра ![]() свидетельствует о наличии интервала колебательной неустойчивости в диапазоне от
свидетельствует о наличии интервала колебательной неустойчивости в диапазоне от ![]() до
до ![]() (
(![]() ,
, ![]() – корни уравнения). Такой интервал может существовать, если коэффициент при
– корни уравнения). Такой интервал может существовать, если коэффициент при ![]() в (3) меньше нуля (необходимое условие наличия интервала колебательной неустойчивости). При
в (3) меньше нуля (необходимое условие наличия интервала колебательной неустойчивости). При ![]() или
или ![]() , интервал колебательной неустойчивости отсутствует.
, интервал колебательной неустойчивости отсутствует.
При l<σ колебательная неустойчивость может реализовываться в интервале ![]() , где
, где ![]() и
и ![]() корни квадратного уравнения
корни квадратного уравнения ![]() . При k=0 интервал колебательной неустойчивости реализуется при l1=0, l2=σ.
. При k=0 интервал колебательной неустойчивости реализуется при l1=0, l2=σ.
На границе интервала скорости, отвечающей паре чисто мнимых корней, в соответствии с теоремой Андронова-Хопфа происходит комплексная бифуркация (рождения-исчезновения) предельного цикла [7].
Представим результаты анализа условий возникновения автоколебаний передней стойки шасси на основе приближенного аналитического подхода [2]. Предполагается, что периодическое решение системы (1) в моменты наибольшего отклонения от положения равновесия и в моменты, когда отклонения равны нулю, изменяется по гармоническому закону, имея некоторое запаздывание по фазе ![]() , здесь а — амплитуда,
, здесь а — амплитуда, ![]() — запаздывание фазы. В характерные моменты времени фазовые переменные и их производные принимают значения
— запаздывание фазы. В характерные моменты времени фазовые переменные и их производные принимают значения
![]()
![]() (4)
(4)
![]()
![]()
В этом случае параметры автоколебаний (![]() ) определяются из системы конечных уравнений, полученной после подстановки (4) в систему (1)
) определяются из системы конечных уравнений, полученной после подстановки (4) в систему (1)
 (5)
(5)
После исключения неизвестных p0, φψ из первых двух уравнений системы (5), получим соотношения (6, 7), которые определяет усредненную частоту периодического решения
 ; (6)
; (6)
и его амплитуду
![]() , (7)
, (7)
где: ![]() нелинейная функция, учитывающая наличие пяточного момента.
нелинейная функция, учитывающая наличие пяточного момента.
Заметим, что подстановка в (7) линейной гипотезы увода приведет к выражению (3), определяющему границы колебательной неустойчивости — амплитудная кривая, примыкающая к оси абсцисс, соответствует устойчивым автоколебаниям, а вырезаемый ею интервал на оси продольной скорости движения соответствует области колебательной неустойчивости.
Для системы (2) аналогичным методом получена неявная функция, определяющая амплитуды автоколебаний по боковой деформации пневматика, из-за громоздкости здесь не приводится (отметим, что при k=0 из выражения амплитудной кривой следуют известные условия устойчивости [8])
![]()
Нелинейная зависимость боковой силы аппроксимировалась дробно иррациональной функцией
 для системы (1),
для системы (1),  для системы (2),
для системы (2),
где: N — вертикальная реакция опоры,
![]() — коэффициент сцепления в поперечном направлении.
— коэффициент сцепления в поперечном направлении.
Графики соответствующих амплитудных кривых (см. рис. 1), получены с помощью пакета MAPLE для следующего набора числовых значений параметров: аy=98100 Н/м; ![]() ; b=2943 Н/м; l=0,25 м; F =30 кгм2; N=5000 Н; k=57,3 Нмс; c=0; α=60 1/м2; β=20 1/м.
; b=2943 Н/м; l=0,25 м; F =30 кгм2; N=5000 Н; k=57,3 Нмс; c=0; α=60 1/м2; β=20 1/м.

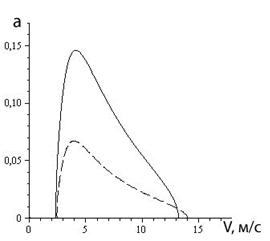
а) б)
Рисунок 1. Сравнение амплитудных кривых систем (1) — пунктирная кривая и (2) — сплошная: a) случай b=0; б) случай b≠0
Поясним «видимое» рассогласование амплитудных кривых по их интенсивности — система (1) характеризуется автоколебаниями по углу увода, а амплитуды автоколебаний системы (2) отнесены к поперечной деформации пневматика (если их отнести к углу увода ![]() , амплитуды будут примерно равные — коэффициент пропорциональности
, амплитуды будут примерно равные — коэффициент пропорциональности ![]() ).
).
Выводы. Таким образом, хотя при k=0 структура области устойчивости в плоскости параметров (l, V) систем (1) и (2) не совпадает, при ненулевом параметре демпфирования процессы автоколебаний идентичны как по областям их возникновения, так и по интенсивности, что указывает на «тесную взаимосвязь» рассматриваемых моделей взаимодействия упругого колеса с опорной поверхностью; учет пяточного момента приводит к расширению области автоколебаний, причем вид нелинейной зависимости пяточного момента на их интенсивность практически не влияет (существенны лишь линейных члены – линейный эффект); уменьшение коэффициента сцепления приводит к снижению интенсивности автоколебаний — нелинейный эффект.
Список литературы:
1.Аронович Г.В. К теории шимми автомобиля и самолета // Прикл. математика и механика. — 1949. — 13, № 5. — С. 477—488.
2.Вельмагина Н.А., Вербицкий В.Г. Анализ автоколебаний колесного модуля в прямолинейном режиме движения. // Механика твердого тела. — 2011. — № 41. С. 100—108.
3.Гоздек В.С. О влиянии различных параметров на устойчивость движения ориентирующихся колес самолета// Тр. ЦАГИ. — 1964. — Вып. 917. — С. 1—30.
4.Гончаренко В.И. Каноническое описание системы управления в задаче о шимми колес шасси самолета.// Прикл. механика. — 2011. — 47, № 2, С. 129—142.
5.Келдыш М.В. Шимми переднего колеса трехколесного шасси. Избранные труды. Механика / М.В. Келдыш. — М: Наука, 1985. — С. 491—530.
6.Лобас Л.Г. Автоколебания колеса на ориентирующейся стойке шасси с нелинейным демпфером // Прикл. математика и механика. — 1981. — 45, № 4. С. 80—87.
7.Марсден Дж., Мак-Кракен М. Бифуркация рождения цикла и ее приложения. — М.: Мир, 1980. — 366 с.
8.Неймарк Ю.И., Фуфаев Н.А. Динамика неголономных систем. — М.: Наука, 1967. — C. 520.
9.Плахтиенко Н.П., Шифрин Б.М. Поперечные упруго-фрикционные вибрации движущегося по взлетно-посадочной полосе самолета.// Прикл. механика. — 2001. — 37, № 5, C. 136—143.
10.Рокар И. Неустойчивость в механике. — М.: Изд-во иностр. Лит., 1959. — 288 с.
11.Санников В.А. Явление возбуждения боковых колебаний катящегося пневматика при циклическом торможении.//Изв. АНСССР. МТТ — 1989. — № 3. — С. 17—23.
12.Besselink J.M.. Shimmy of aircraft main landing gears. PhD thesis, Delft University of Technology, 2000. — P. 201.
13.B. von Schlippe and R. Dietrich, Das Flattern eines bepneuten Rades, Bericht 140 der Lilienthal Gesellschaft (1941), English translation: NACA TM 1365, 1954. — P. 125—147.
14.Pacejka H.B., The wheel shimmy phenomenon, Doctoral Thesis, Delft University of Technology, December 1966.
15.Sharp R.S. and Jones C.J., A comparison of tyre representations in a simple wheel shimmy problem, Vehicle System Dynamics 9, 1980. — P. 45—57.
16.Somieski G., Shimmy analysis of a simple aircraft nose landing gear model using different mathematical methods. Aerospace Science and Technology 8, 1997. — P. 545—555.
17.Yi. Mi-Seon, Bae. Jae-Sung, Hwang. Jae-Hyuk. Non-linear shimmy analysis of a nose landing gear with friction, Journal of the Korean society for aeronautical & space sciences, 39, № 7, 2011. — P. 605—611.
дипломов
Оставить комментарий